Product Description
| Basic parameter | |||||||
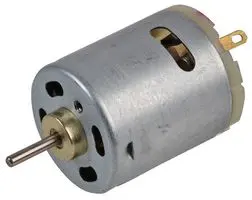
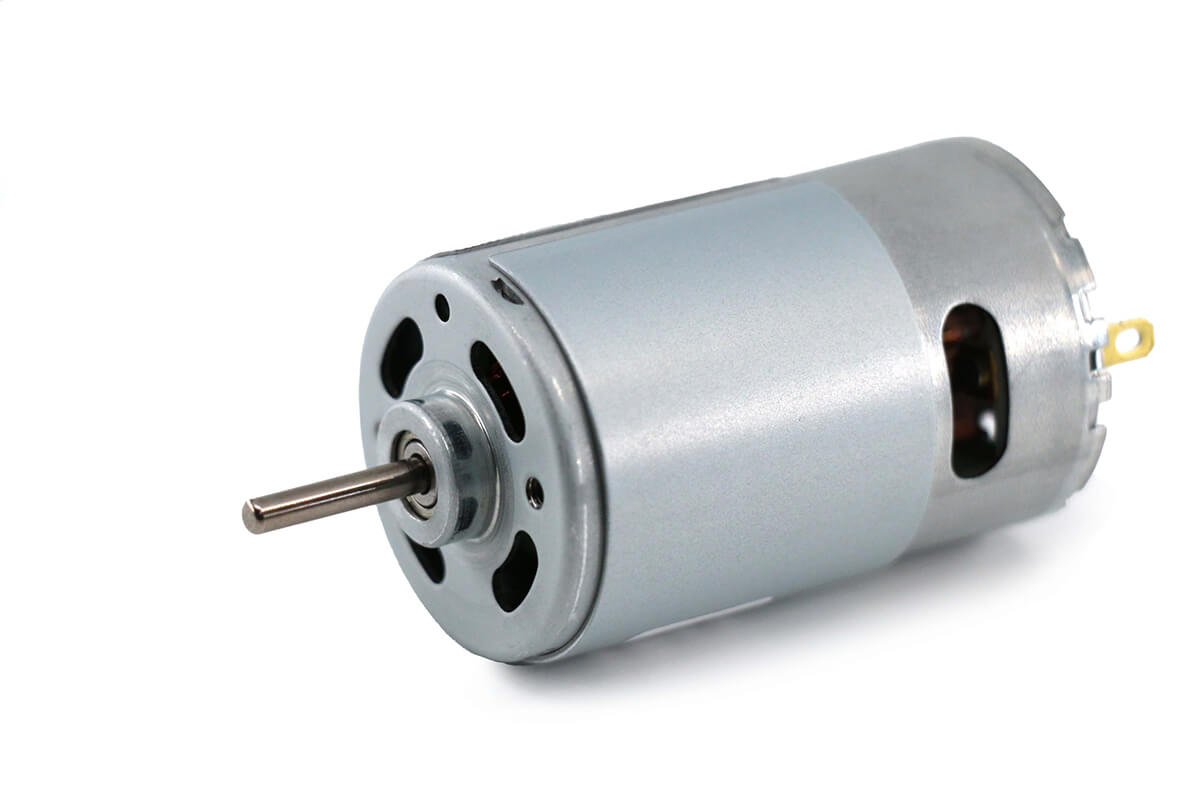
| Motor size:Φ25.7mx 19.3mm | Shaft core: titanium alloy | ||||||
| Coil wire: high temperature resistant copper | Slot pole :12N14P | ||||||
| Output axis: 13.0mm*M5 | Lead :20AWG*150MM | ||||||
| Magnet type: Tile | Mounting hole: | 4*M2*∅12 | |||||
| 4*M3*∅16 | |||||||
| Winding mode: Single strand | Stator diameter :22.0mm | ||||||
| Motor parameter |
|||||||
| KV value:1650 | Voltage support:(3-6S) | ||||||
| unloaded(10V):0.36A | Interphase internal resistance:216Ω | ||||||
| Maximum power:370W | Weight line:21.6g | ||||||
| Load performance(1650KV) | |||||||
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 4032 | 20 | 23.99 | 0.933 | 9932 | 72.34 | 22.45 | 3.110 |
| 30 | 23.96 | 1.928 | 14838 | 167.2 | 46.25 | 3.438 | |
| 40 | 23.93 | 2.964 | 17267 | 231.97 | 70.95 | 3.107 | |
| 50 | 23.91 | 4.026 | 19288 | 292.76 | 96.35 | 2.889 | |
| 60 | 23.88 | 5.035 | 2 0571 | 349.9 | 120.25 | 2.765 | |
| 70 | 23.86 | 6.059 | 22328 | 403.82 | 144.65 | 2.653 | |
| 80 | 23.82 | 7.792 | 24262 | 484.62 | 185.65 | 2.480 | |
| 90 | 23.77 | 10.156 | 26656 | 578.34 | 241.45 | 2.276 | |
| 100 | 23.73 | 11.295 | 27305 | 622.42 | 268.05 | 2.206 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 5043 | 20 | 24 | 1.008 | 7319 | 87.25 | 24.25 | 3.501 |
| 30 | 23.97 | 2.317 | 11439 | 212.56 | 55.55 | 3.635 | |
| 40 | 23.94 | 3.467 | 13495 | 300.02 | 83.05 | 3.438 | |
| 50 | 23.91 | 4.68 | 15093 | 388.96 | 111.95 | 3.303 | |
| 60 | 23.87 | 6.511 | 17087 | 478.97 | 155.45 | 2.928 | |
| 70 | 23.82 | 8.483 | 18555 | 577.95 | 202.15 | 2.717 | |
| 80 | 23.74 | 11.559 | 20155 | 688.53 | 274.45 | 2.384 | |
| 90 | 23.67 | 14.444 | 21498 | 787.14 | 341.95 | 2.187 | |
| 100 | 23.63 | 15.661 | 22074 | 813.33 | 370.15 | 2.088 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 5125 | 20 | 23.99 | 0.946 | 1 0571 | 102.48 | 22.75 | 4.289 |
| 30 | 23.97 | 1.986 | 13795 | 193.98 | 47.65 | 3.870 | |
| 40 | 23.95 | 3.105 | 16081 | 279.1 | 74.35 | 3.566 | |
| 50 | 23.92 | 4.254 | 18069 | 352.99 | 101.75 | 3.296 | |
| 60 | 23.89 | 5.473 | 19609 | 432.05 | 130.85 | 3.139 | |
| 70 | 23.85 | 6.843 | 21049 | 508.26 | 163.25 | 2.958 | |
| 80 | 23.81 | 8.907 | 23106 | 611.47 | 212.15 | 2.740 | |
| 90 | 23.74 | 11.718 | 24922 | 737.83 | 278.15 | 2.520 | |
| 100 | 23.7 | 12.929 | 25569 | 777.37 | 306.45 | 2.410 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 51466 | 20 | 23.99 | 1.041 | 9038 | 114.18 | 25.05 | 4.343 |
| 30 | 23.97 | 2.148 | 11914 | 204.76 | 51.55 | 3.778 | |
| 40 | 23.94 | 3.308 | 13916 | 288.89 | 79.25 | 3.466 | |
| 50 | 23.9 | 4.612 | 15773 | 375.34 | 110.35 | 3.234 | |
| 60 | 23.87 | 6.305 | 17387 | 470.35 | 150.55 | 2.969 | |
| 70 | 23.83 | 8.288 | 18920 | 568.13 | 197.55 | 2.733 | |
| 80 | 23.74 | 11.136 | 20781 | 676.9 | 264.45 | 2.432 | |
| 90 | 23.67 | 14.3 | 22087 | 785.32 | 338.55 | 2.204 | |
| 100 | 23.64 | 15.44 | 22599 | 811.73 | 365.05 | 2.113 | |
| Motor load @ 100% throttle operation, at an ambient temperature of 26 degrees Celsius, the above data is for reference only | |||||||
| Motor parameter | |||||||
| KV value:2400 | Voltage support:(3-6S) | ||||||
| unloaded(10V):0.75A | Interphase internal resistance:134Ω | ||||||
| Maximum power:577W | Weight line:21.6g | ||||||
| Load performance(2400KV) | |||||||
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 5032 | 20 | 23.96 | 1.975 | 13712 | 144.46 | 47.35 | 2.900 |
| 30 | 23.92 | 4.138 | 17958 | 255.47 | 98.95 | 2.452 | |
| 40 | 23.85 | 6.799 | 21164 | 344.62 | 162.25 | 2.019 | |
| 50 | 23.79 | 9.543 | 23128 | 432.41 | 227.05 | 1.812 | |
| 60 | 23.68 | 13.354 | 24316 | 482.31 | 316.25 | 1.451 | |
| 70 | 23.6 | 16.467 | 24686 | 484.3 | 388.55 | 1.214 | |
| 80 | 23.58 | 16.64 | 28397 | 657.12 | 392.35 | 1.591 | |
| 90 | 23.46 | 21.077 | 35713 | 749.8 | 494.45 | 1.440 | |
| 100 | 23.42 | 22.935 | 31063 | 785.27 | 537.15 | 1.389 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 5125 | 20 | 22 | 1.542 | 9768 | 99.45 | 33.95 | 3.083 |
| 30 | 21.95 | 4.101 | 16125 | 286.05 | 90.05 | 3.019 | |
| 40 | 21.89 | 6.505 | 18648 | 394.04 | 142.45 | 2.629 | |
| 50 | 21.82 | 9.599 | 20142 | 492.88 | 209.55 | 2.235 | |
| 60 | 21.76 | 12.154 | 22132 | 578.87 | 264.55 | 2.080 | |
| 70 | 21.67 | 15.855 | 23560 | 642.25 | 343.55 | 1.796 | |
| 80 | 21.62 | 17.994 | 25470 | 793.67 | 389.05 | 1.938 | |
| 90 | 21.51 | 22.536 | 27571 | 887.88 | 484.85 | 1.739 | |
| 100 | 21.47 | 24.416 | 27669 | 925.93 | 524.15 | 1.679 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 51466 | 20 | 21.99 | 2.059 | 10622 | 158.77 | 45.35 | 3.330 |
| 30 | 21.94 | 4.34 | 13929 | 285.08 | 95.25 | 2.843 | |
| 40 | 21.87 | 7.113 | 16101 | 391.9 | 155.65 | 2.394 | |
| 50 | 21.8 | 10.24 | 18352 | 496.71 | 223.35 | 2.114 | |
| 60 | 21.73 | 13.236 | 19363 | 576.19 | 287.65 | 1.903 | |
| 70 | 21.65 | 16.707 | 20682 | 678.06 | 361.75 | 1.781 | |
| 80 | 21.55 | 20.836 | 22438 | 798.72 | 448.95 | 1.690 | |
| 90 | 21.45 | 24.98 | 23197 | 856.64 | 535.85 | 1.519 | |
| 100 | 21.4 | 26.981 | 23439 | 882.44 | 577.45 | 1.452 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| HQ433 | 20 | 23.97 | 1.917 | 14746 | 140.06 | 45.95 | 2.896 |
| 30 | 23.92 | 3.931 | 19392 | 251.26 | 94.05 | 2.538 | |
| 40 | 23.87 | 6.214 | 22352 | 347.54 | 148.35 | 2.228 | |
| 50 | 23.8 | 9.126 | 24993 | 423.42 | 217.25 | 1.859 | |
| 60 | 22.73 | 11.671 | 23840 | 515.21 | 277.05 | 1.767 | |
| 70 | 23.68 | 13.743 | 29571 | 573.55 | 325.45 | 1.675 | |
| 80 | 23.6 | 16.153 | 3571 | 654.81 | 381.25 | 1.632 | |
| 90 | 23.49 | 19.948 | 32435 | 736.63 | 468.65 | 1.493 | |
| 100 | 23.46 | 21.094 | 33578 | 771.26 | 494.95 | 1.481 | |
| Motor load @ 100% throttle operation, at an ambient temperature of 26 degrees Celsius, the above data is for reference only | |||||||
| Motor parameter | |||||||
| KV value:3400 | Voltage support:(4S) | ||||||
| unloaded(10V):1.29A | Interphase internal resistance:61Ω | ||||||
| Maximum power:546W | Weight line:21.6g | ||||||
| Load performance(3400KV) | |||||||
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 5043 | 20 | 15.97 | 2.737 | 9585 | 149 | 43.75 | 3.239 |
| 30 | 15.89 | 5.961 | 12428 | 263.14 | 94.75 | 2.639 | |
| 40 | 15.8 | 9.545 | 15571 | 374.19 | 150.85 | 2.357 | |
| 50 | 15.7 | 13.803 | 16722 | 467.4 | 216.75 | 2.049 | |
| 60 | 15.61 | 17.813 | 18290 | 559.29 | 278.05 | 1.911 | |
| 70 | 15.5 | 22.372 | 19890 | 660.33 | 346.75 | 1.810 | |
| 80 | 15.36 | 28.158 | 21571 | 748.8 | 432.65 | 1.644 | |
| 80 | 15.37 | 27.878 | 2 0571 | 741.36 | 428.35 | 1.644 | |
| 90 | 15.23 | 32.302 | 21555 | 791.44 | 491.85 | 1.536 | |
| 100 | 15.14 | 36.085 | 22175 | 837.55 | 546.25 | 1.456 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| HQ433 | 20 | 15.97 | 2.469 | 12831 | 106.22 | 39.45 | 2.577 |
| 30 | 15.91 | 5.033 | 17536 | 204.17 | 80.15 | 2.430 | |
| 40 | 15.85 | 7.788 | 21054 | 300.23 | 123.55 | 2.310 | |
| 50 | 15.76 | 11.319 | 23213 | 384.27 | 178.45 | 2.046 | |
| 60 | 15.65 | 16.144 | 23958 | 410.02 | 252.55 | 1.553 | |
| 70 | 15.57 | 19.301 | 25220 | 468.84 | 300.15 | 1.526 | |
| 80 | 15.57 | 19.297 | 29242 | 594.70 | 300.55 | 1.880 | |
| 90 | 15.45 | 24.448 | 31574 | 687.49 | 377.75 | 1.729 | |
| 100 | 15.4 | 26.715 | 32551 | 738.85 | 411.35 | 1.707 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 51466 | 20 | 15.96 | 2.726 | 10056 | 142.32 | 43.55 | 3.107 |
| 30 | 15.9 | 5.841 | 13037 | 252.21 | 92.85 | 2.582 | |
| 40 | 15.8 | 9.52 | 15623 | 367.53 | 150.55 | 2.320 | |
| 50 | 15.71 | 13.47 | 17005 | 445.96 | 211.65 | 2.002 | |
| 60 | 15.62 | 17.267 | 18853 | 537.88 | 269.85 | 1.894 | |
| 70 | 15.51 | 21.927 | 2 0571 | 635.5 | 340.05 | 1.776 | |
| 80 | 15.37 | 27.728 | 21719 | 733.91 | 426.25 | 1.636 | |
| 80 | 15.38 | 27.499 | 21697 | 728.03 | 422.85 | 1.636 | |
| 90 | 15.24 | 32.989 | 22643 | 803.45 | 502.85 | 1.518 | |
| 100 | 15.15 | 35.717 | 23571 | 827.64 | 541.05 | 1.454 | |
| paddle | Throttle (%) |
Voltage(V) | Curren (A) |
Speed (rpm) |
pulling force(g) | Power(W) | force effect (g/w) |
| 5125 | 20 | 15.98 | 2.498 | 11850 | 140.95 | 39.95 | 3.352 |
| 30 | 15.91 | 5.531 | 15465 | 256.07 | 88.05 | 2.764 | |
| 40 | 15.84 | 8.507 | 17994 | 358.98 | 134.85 | 2.531 | |
| 60 | 15.66 | 16.26 | 21381 | 528.6 | 254.65 | 1.973 | |
| 70 | 15.6 | 18.631 | 22881 | 625.19 | 290.65 | 2.043 | |
| 80 | 15.46 | 24.283 | 24856 | 745.9 | 375.55 | 1.888 | |
| 90 | 15.33 | 29.944 | 26351 | 846.96 | 458.95 | 1.754 | |
| 100 | 15.27 | 32.257 | 26867 | 893.74 | 492.65 | 1.723 | |
| Motor load @ 100% throttle operation, at an ambient temperature of 26 degrees Celsius, the above data is for reference only | |||||||
Common problems:
Q: Who are we?
A: We are a specialized manufacturer of drone motors
Q: Can you give me a sample order for the drone motor?
Answer: Yes, the minimum order quantity is low, you can provide 1 sample for testing, but you are responsible for the transportation cost.
Q. What about wait times?
A: Samples take 7-10 days.
Q: How do you ship the goods? How long will it take to get there?
A: We usually ship by air. It usually takes 7-15 days to arrive. Please contact us if you need another mode of transportation before shipping.
Q: Can you support oem and odm?
A: We can provide you with OEM/ODM services.
Q: What is the lead time of the sample?
A: Usually 1-3 weeks.
Q: What is the lead time for mass production?
A: Usually 1 month. It depends on the quantity of your order or other special circumstances.
Q: What are your payment terms?
A: T/T, Western Union and other payment methods are available. Please contact us with the payment method you require before ordering. Payment terms: 30%-50% deposit, balance paid before delivery.
Q: Can my logo be printed on the product?
A. Yes. Please inform and authorize us officially before we produce, and confirm the design according to the sample.
Q: Can I visit your factory before ordering?
A: Yes, welcome to visit our factory.
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial |
|---|---|
| Operating Speed: | High Speed |
| Excitation Mode: | Excited |
| Function: | Control |
| Casing Protection: | Protection Type |
| Number of Poles: | 14 |
| Samples: |
US$ 16/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|
What are the key differences between brushed and brushless DC motors?
Brushed and brushless DC motors are two distinct types of motors that differ in their construction, operation, and performance characteristics. Here’s a detailed explanation of the key differences between brushed and brushless DC motors:
1. Construction:
Brushed DC Motors: Brushed DC motors have a relatively simple construction. They consist of a rotor with armature windings and a commutator, and a stator with permanent magnets or electromagnets. The commutator and brushes make physical contact to provide electrical connections to the armature windings.
Brushless DC Motors: Brushless DC motors have a more complex construction. They typically consist of a stationary stator with permanent magnets or electromagnets and a rotor with multiple coils or windings. The rotor does not have a commutator or brushes.
2. Commutation:
Brushed DC Motors: In brushed DC motors, the commutator and brushes are responsible for the commutation process. The brushes make contact with different segments of the commutator, reversing the direction of the current through the armature windings as the rotor rotates. This switching of the current direction generates the necessary torque for motor rotation.
Brushless DC Motors: Brushless DC motors use electronic commutation instead of mechanical commutation. The commutation process is managed by an external electronic controller or driver. The controller determines the timing and sequence of energizing the stator windings based on the rotor position, allowing for precise control of motor operation.
3. Efficiency:
Brushed DC Motors: Brushed DC motors tend to have lower efficiency compared to brushless DC motors. This is primarily due to the energy losses associated with the brushes and commutation process. The friction and wear between the brushes and commutator result in additional power dissipation and reduce overall motor efficiency.
Brushless DC Motors: Brushless DC motors are known for their higher efficiency. Since they eliminate the use of brushes and commutators, there are fewer energy losses and lower frictional losses. The electronic commutation system allows for precise control of the motor’s operation, maximizing efficiency and reducing power consumption.
4. Maintenance:
Brushed DC Motors: Brushed DC motors require regular maintenance due to the wear and tear of the brushes and commutator. The brushes need periodic replacement, and the commutator requires cleaning to maintain proper electrical contact. The maintenance requirements contribute to additional costs and downtime for brushed DC motors.
Brushless DC Motors: Brushless DC motors have a relatively maintenance-free operation. As they do not have brushes or commutators, there is no need for brush replacement or commutator cleaning. This results in reduced maintenance costs and increased reliability of brushless DC motors.
5. Speed Control:
Brushed DC Motors: Brushed DC motors offer simpler speed control options. The speed can be controlled by adjusting the applied voltage or by varying the resistance in the armature circuit. This allows for relatively straightforward speed regulation.
Brushless DC Motors: Brushless DC motors provide more advanced and precise speed control capabilities. The speed can be controlled through the electronic commutation system by adjusting the timing and sequence of the stator windings’ energization. This allows for precise control of the motor’s speed and acceleration.
These key differences between brushed and brushless DC motors make each type suitable for different applications depending on factors such as efficiency requirements, maintenance considerations, and control complexity.

How do DC motors compare to AC motors in terms of performance and efficiency?
When comparing DC (Direct Current) motors and AC (Alternating Current) motors, several factors come into play, including performance and efficiency. Here’s a detailed explanation of how DC motors and AC motors compare in terms of performance and efficiency:
1. Performance:
Speed Control: DC motors typically offer better speed control compared to AC motors. DC motors can be easily controlled by varying the voltage applied to the armature, allowing for precise and smooth speed regulation. On the other hand, AC motors rely on complex control methods such as variable frequency drives (VFDs) to achieve speed control, which can be more challenging and costly.
Starting Torque: DC motors generally provide higher starting torque compared to AC motors. The presence of a separate field winding in DC motors allows for independent control of the field current, enabling higher torque during motor startup. AC motors, especially induction motors, typically have lower starting torque, requiring additional starting mechanisms or devices.
Reversibility: DC motors offer inherent reversibility, meaning they can easily change their rotational direction by reversing the polarity of the applied voltage. AC motors, particularly induction motors, require more complex control mechanisms to achieve reversible operation.
Dynamic Response: DC motors have faster dynamic response characteristics compared to AC motors. They can quickly accelerate or decelerate, making them suitable for applications that require rapid changes in speed or precise control, such as robotics or servo systems.
2. Efficiency:
Full Load Efficiency: AC motors, especially three-phase induction motors, generally exhibit higher full load efficiencies compared to DC motors. This efficiency advantage is primarily due to the absence of commutation and the use of a rotating magnetic field in AC motors, which results in reduced energy losses and improved efficiency.
Partial Load Efficiency: DC motors can have higher efficiency at partial loads compared to AC motors. DC motors can be controlled by adjusting the armature voltage, allowing them to operate at reduced power while maintaining relatively high efficiency. AC motors, especially induction motors, may experience reduced efficiency at partial loads due to factors such as increased iron losses and reduced power factor.
Regenerative Braking: DC motors offer the advantage of regenerative braking, where the motor acts as a generator and converts kinetic energy into electrical energy during deceleration or braking. This regenerative braking capability allows for energy recovery, increasing overall system efficiency. AC motors typically require additional components or systems to achieve regenerative braking.
Power Factor: AC motors, when properly designed and operated, can have a power factor close to unity. This means that they draw relatively low reactive power from the electrical grid, resulting in improved power system efficiency. DC motors, on the other hand, may exhibit a lower power factor and require power factor correction measures if necessary.
In summary, DC motors and AC motors have their respective strengths and weaknesses in terms of performance and efficiency. DC motors excel in speed control, starting torque, reversibility, and dynamic response. AC motors, particularly three-phase induction motors, generally offer higher full load efficiency and power factor. However, DC motors can achieve higher efficiency at partial loads and have the advantage of regenerative braking. The choice between DC motors and AC motors depends on the specific application requirements, cost considerations, and the desired balance between performance and efficiency.
Are there safety considerations or maintenance practices associated with DC motors?
Yes, there are safety considerations and maintenance practices associated with DC (Direct Current) motors. DC motors, like any other electrical equipment, require proper handling, maintenance, and adherence to safety guidelines to ensure safe operation and longevity. Here’s a detailed explanation of the safety considerations and maintenance practices associated with DC motors:
Safety Considerations:
Electrical Hazards: DC motors operate with high voltages and currents, posing electrical hazards. It is essential to follow proper electrical safety practices, such as wearing appropriate personal protective equipment (PPE) and ensuring that electrical connections are secure and insulated. Proper grounding and isolation techniques should be employed to prevent electrical shocks and accidents.
Lockout/Tagout: DC motors, especially in industrial settings, may require maintenance or repair work. It is crucial to implement lockout/tagout procedures to isolate the motor from its power source before performing any maintenance or servicing activities. This ensures that the motor cannot be accidentally energized during work, preventing potential injuries or accidents.
Overheating and Ventilation: DC motors can generate heat during operation. Adequate ventilation and cooling measures should be implemented to prevent overheating, as excessive heat can lead to motor damage or fire hazards. Proper airflow and ventilation around the motor should be maintained, and any obstructions or debris should be cleared.
Mechanical Hazards: DC motors often have rotating parts and shafts. Safety guards or enclosures should be installed to prevent accidental contact with moving components, mitigating the risk of injuries. Operators and maintenance personnel should be trained to handle motors safely and avoid placing their hands or clothing near rotating parts while the motor is running.
Maintenance Practices:
Cleaning and Inspection: Regular cleaning and inspection of DC motors are essential for their proper functioning. Accumulated dirt, dust, or debris should be removed from the motor’s exterior and internal components. Visual inspections should be carried out to check for any signs of wear, damage, loose connections, or overheating. Bearings, if applicable, should be inspected and lubricated as per the manufacturer’s recommendations.
Brush Maintenance: DC motors that use brushes for commutation require regular inspection and maintenance of the brushes. The brushes should be checked for wear, proper alignment, and smooth operation. Worn-out brushes should be replaced to ensure efficient motor performance. Brush holders and springs should also be inspected and cleaned as necessary.
Electrical Connections: The electrical connections of DC motors should be periodically checked to ensure they are tight, secure, and free from corrosion. Loose or damaged connections can lead to voltage drops, overheating, and poor motor performance. Any issues with the connections should be addressed promptly to maintain safe and reliable operation.
Insulation Testing: Insulation resistance testing should be performed periodically to assess the condition of the motor’s insulation system. This helps identify any insulation breakdown or degradation, which can lead to electrical faults or motor failures. Insulation resistance testing should be conducted following appropriate safety procedures and using suitable testing equipment.
Alignment and Balance: Proper alignment and balance of DC motors are crucial for their smooth operation and longevity. Misalignment or imbalance can result in increased vibrations, excessive wear on bearings, and reduced motor efficiency. Regular checks and adjustments should be made to ensure the motor is correctly aligned and balanced as per the manufacturer’s specifications.
Manufacturer’s Recommendations: It is important to refer to the manufacturer’s guidelines and recommendations for specific maintenance practices and intervals. Each DC motor model may have unique requirements, and following the manufacturer’s instructions ensures that maintenance is carried out correctly and in accordance with the motor’s design and specifications.
By adhering to safety considerations and implementing proper maintenance practices, DC motors can operate safely, reliably, and efficiently throughout their service life.


editor by CX 2024-04-23